실습-1에서는 터틀봇을 움직여보고 Rviz2에서 로봇을 불러와 동작을 시킨 뒤 Gazebo 환경에서도 같이 움직이는 것을 보았다.
이번에는 맵을 라이다로 학습하여 장애물을 인지해서 목표지점을 정하였을 때 길을 찾는 작업을 해보도록 하겠다.
실습환경은 동일하게 Ubuntu 20.04, ros foxy에서 진행된다.
Nav_simulation
# Terminal 1
# TurtleBot3 준비
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
# Terminal 2
# 매핑
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
# Terminal 3
# 내비게이션
ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=True map:=$HOME/map.yaml
# Terminal 4
ros2 run turtlebot3_teleop teleop_keyboard
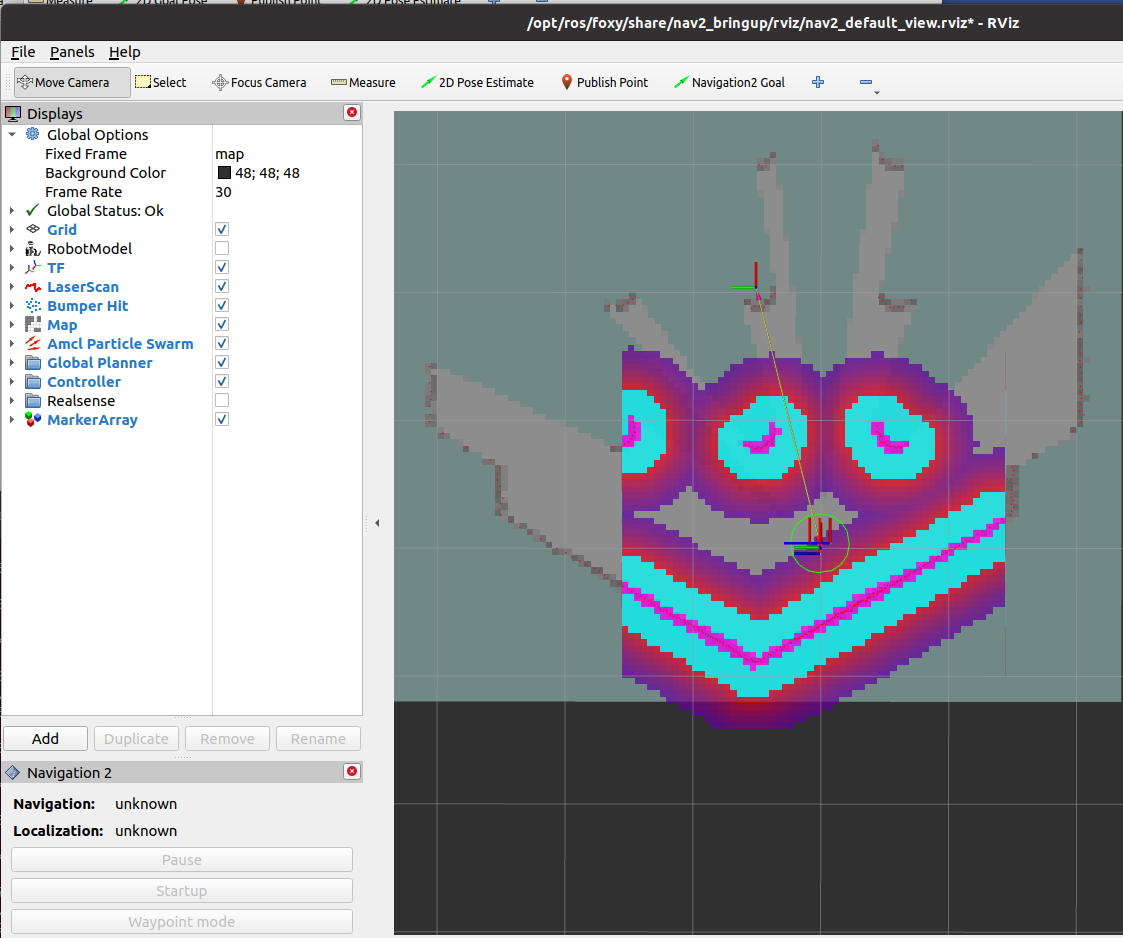
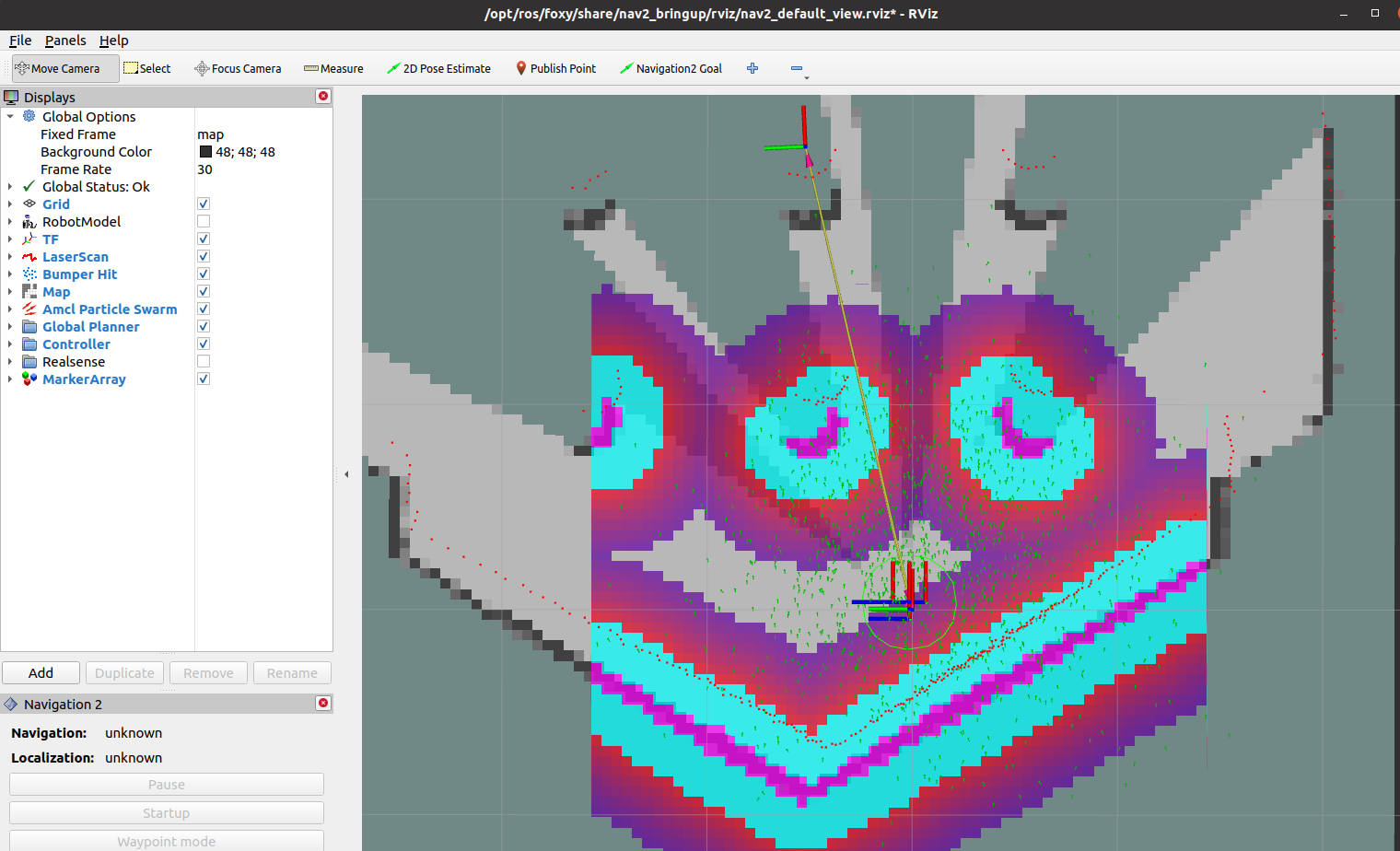
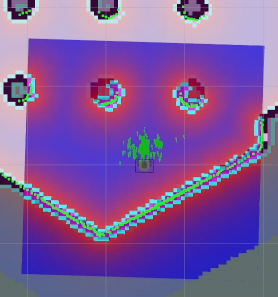
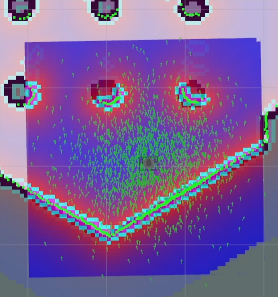
로봇을 앞뒤로 움직여 주변 환경 정보를 수집하고 녹색 화살표로 표시되는 지도에서 예상 위치를 좁혀보세요.
이후 혹시 모를 충돌을 예방하기 # Terminal 4의 프로그램을 Ctrl + C (강제종료) 시킵니다.
Navigation2 Goal 버튼을 누르고 목적지와 방향을 지정해줍니다.
마우스 클릭하는 지점이 목적지입니다.
728x90
'ROS' 카테고리의 다른 글
| TurtleBot3 실습-1 (0) | 2024.10.02 |
|---|---|
| ROS foxy install (0) | 2024.10.02 |